 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInvestigating task-specific prompts and sparse autoencoders for activation monitoring
Apr 28, 2025Language models can behave in unexpected and unsafe ways, and so it is valuable to monitor their outputs. Internal activations of language models encode additional information that could be useful for this. The baseline approach for activation monitoring is some variation of linear probing on a particular layer: starting from a labeled dataset, train a logistic regression classifier on that layer's activations. Recent work has proposed several approaches which may improve on naive linear probing, by leveraging additional computation. One class of techniques, which we call "prompted probing," leverages test time computation to improve monitoring by (1) prompting the model with a description of the monitoring task, and (2) applying a learned linear probe to resulting activations. Another class of techniques uses computation at train time: training sparse autoencoders offline to identify an interpretable basis for the activations, and e.g. max-pooling activations across tokens using that basis before applying a linear probe. However, one can also prompt the model with a description of the monitoring task and use its output directly. We develop and test novel refinements of these methods and compare them against each other. We find asking the model zero-shot is a reasonable baseline when inference-time compute is not limited; however, activation probing methods can substantially outperform this baseline given sufficient training data. Specifically, we recommend prompted probing when inference-time compute is available, due to its superior data efficiency and good generalization performance. Alternatively, if inference-time compute is limited, we find SAE-based probing methods outperform raw activation probing.
Scaling and evaluating sparse autoencoders
Jun 06, 2024



Sparse autoencoders provide a promising unsupervised approach for extracting interpretable features from a language model by reconstructing activations from a sparse bottleneck layer. Since language models learn many concepts, autoencoders need to be very large to recover all relevant features. However, studying the properties of autoencoder scaling is difficult due to the need to balance reconstruction and sparsity objectives and the presence of dead latents. We propose using k-sparse autoencoders [Makhzani and Frey, 2013] to directly control sparsity, simplifying tuning and improving the reconstruction-sparsity frontier. Additionally, we find modifications that result in few dead latents, even at the largest scales we tried. Using these techniques, we find clean scaling laws with respect to autoencoder size and sparsity. We also introduce several new metrics for evaluating feature quality based on the recovery of hypothesized features, the explainability of activation patterns, and the sparsity of downstream effects. These metrics all generally improve with autoencoder size. To demonstrate the scalability of our approach, we train a 16 million latent autoencoder on GPT-4 activations for 40 billion tokens. We release training code and autoencoders for open-source models, as well as a visualizer.
SegNBDT: Visual Decision Rules for Segmentation
Jun 11, 2020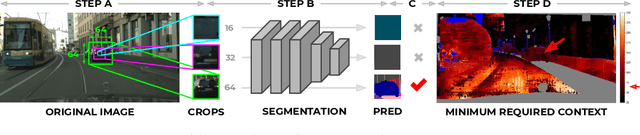

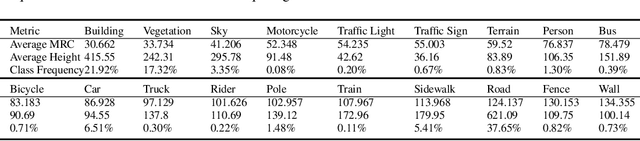

The black-box nature of neural networks limits model decision interpretability, in particular for high-dimensional inputs in computer vision and for dense pixel prediction tasks like segmentation. To address this, prior work combines neural networks with decision trees. However, such models (1) perform poorly when compared to state-of-the-art segmentation models or (2) fail to produce decision rules with spatially-grounded semantic meaning. In this work, we build a hybrid neural-network and decision-tree model for segmentation that (1) attains neural network segmentation accuracy and (2) provides semi-automatically constructed visual decision rules such as "Is there a window?". We obtain semantic visual meaning by extending saliency methods to segmentation and attain accuracy by leveraging insights from neural-backed decision trees, a deep learning analog of decision trees for image classification. Our model SegNBDT attains accuracy within ~2-4% of the state-of-the-art HRNetV2 segmentation model while also retaining explainability; we achieve state-of-the-art performance for explainable models on three benchmark datasets -- Pascal-Context (49.12%), Cityscapes (79.01%), and Look Into Person (51.64%). Furthermore, user studies suggest visual decision rules are more interpretable, particularly for incorrect predictions. Code and pretrained models can be found at https://github.com/daniel-ho/SegNBDT.